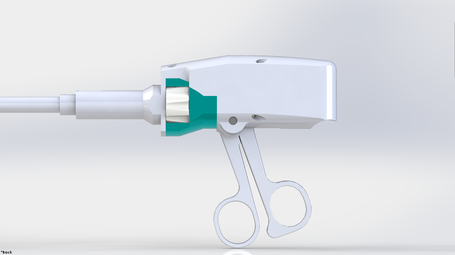
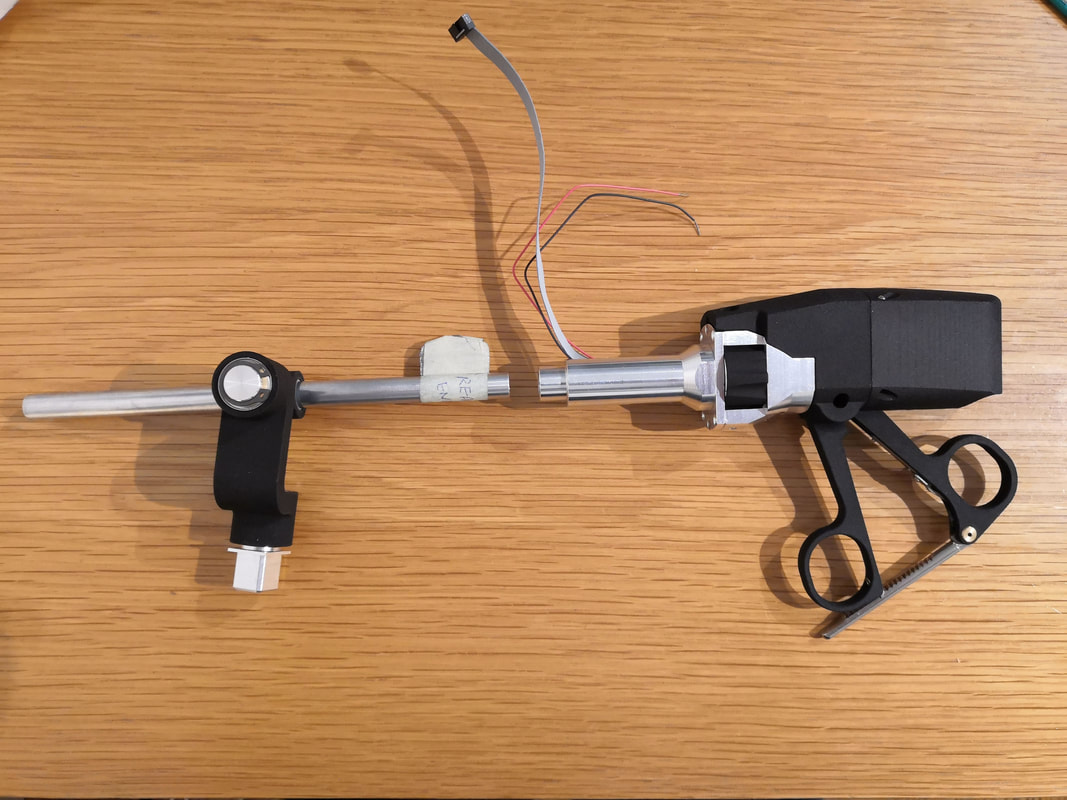
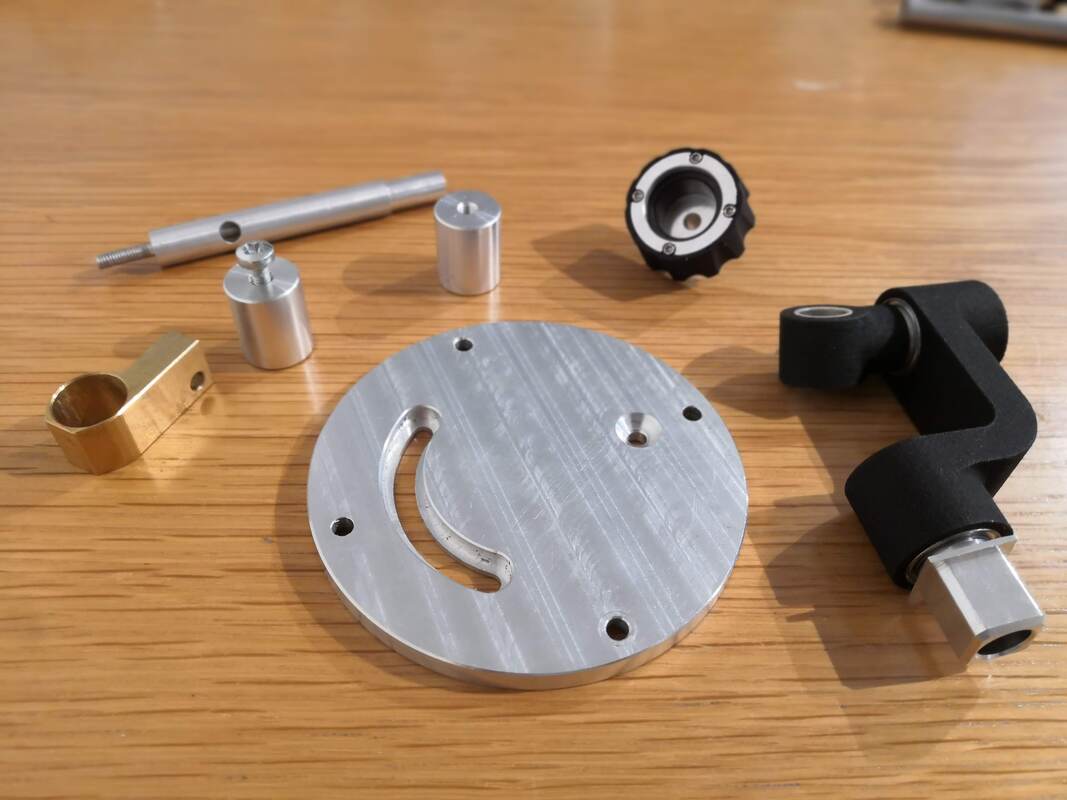
This is a prototype tool I designed while working for Generic Robotics, a company using haptic robots in conjunction with VR for clinical skills training. The tool is designed to fit GR's generic haptic platform. I completed the project while an employee at GR, but later undertook the machining and assembly of all components on a consulting basis. The tool features haptic constraint of the tool clamping motion, and passively damped dial for tool rotation. Sadly I can't show the internals, but I can share some renderings of the design and pictures of the machined components. The rendering in the left shows the tool connected to the end effector of GR's haptic robot (the blue assembly with two L-brackets).

|
|
|
|
